在海上也能如“立”平地 无人潜水器收放实现稳、准、快
“船载无人潜水器收放系统”相关装备的国产化、系列化,填补了国内相关技术和装备空白,推动了船用装备技术与产业的发展,也为海防事业作出了突出贡献。
复杂海况下无人潜水器的布放与回收是世界性难题。
不久前,由江苏科技大学牵头的国家重点研发计划“深海关键技术与装备”重点专项“船载无人潜水器收放系统”项目,在我国东海海域通过了科技部规范化海上试验验收,标志着我国解决了复杂海况下无人潜水器收放的世界性难题。该研发团队由江苏科技大学教授卢道华牵头。
研发团队在舟山复杂多变海流情况下,针对上述装备进行了实船实况布放与回收试验,分别对自治式潜水器(AUV)、遥控式潜水器(ROV)、水下滑翔机(AUG)、自治遥控混合式潜水器(ARV)等多种无人潜水器实施了收放作业。试验结果表明,新装备工作正常、过程可控、达到预期设计目标,作业效率较国内外传统收放装备明显提高。
在海上也能如“立”平地
随着最新技术与装备后续的研发与推广应用,更多更优的国产化波浪补偿装备将批量上船,改善在恶劣海况下的作业环境,使得海上作业人员、装备,甚至全船都如“立”平地,不再受波浪颠簸摇摆的影响。
卢道华介绍,受波浪影响,船舶会产生不同程度的摇摆和颠簸,这是长期困扰海上收放作业的重大难题。过去,在海上布放与回收无人潜水器没有专用装置,每当遇到复杂恶劣海况,采用常规的起重设备和收放装置进行布放回收,时常导致潜水器碰撞、损坏或丢失,影响科考或海上作业进度、造成财产损失,给科考和海水作业人员带来巨大压力与风险挑战,甚至会威胁操作人员的生命安全。
“以波浪高度为指标,海况等级可划分为0级到9级,复杂海况、恶劣海况一般指4级(浪高大约1.5米)及以上海况。此时,母船会剧烈颠簸与摇摆,导致船上人员严重不适、设备无法工作,回收无人潜水器则更加艰险。” 卢道华说。
波浪补偿技术通过检测与预判波浪引起的母船或装置运动规律,应用机电一体化装置对波浪引起的运动进行逆向补偿,消除波浪运动对设备与人员的影响,让人员犹如在陆地上作业与生活,使设备如“立”平地。
中国船舶集团旗下南京中船绿洲机器有限公司所属镇江辅机公司技术副总经理葛小明向科技日报记者介绍,联合团队研发了船载多自由度主动波浪补偿门架吊放装备,实现了船上用于收放的基本平台装备的平稳性;同时研制了能快速、精准作业的遥操作水下机械手、带动力水中主动收放装置、抓取式收放笼等新型装备。这些新型装备的配套联合使用,能有效解决传统的收放方式下作业装备与收放目标同时无规律扰动的问题。
“项目提供的波浪补偿吊接平台与多功能水面收放装备,为海上收放作业提供了有效保障和多项选择,多项技术与装备为业界内首次创新与应用。”葛小明表示。
适用各类型无人潜水器
为提高复杂海况下无人潜水器回收的成功率,团队攻克了四自由度补偿式门架结构、三自由度补偿式转接吊头结构等关键技术,研发的主动波浪补偿收放系统能够有效减小波浪对收放系统海上作业的影响,还研发了多款复杂海况下对无人潜水器进行定位和捕捉的专用装置。
该收放系统搭载着多个转接装置,能完成各种类型的无人潜水器的回收,具有覆盖面广、通用性强等特点。同时,收放系统自动化和智能化程度较高,具备舷边遥控操作、远程操作、视觉信号辅助操作、运维保障操作等功能。
“项目研制的新型装备保障了复杂海况下海上作业的成功与人员安全。”葛小明说。
卢道华介绍说,船载多自由度主动波浪补偿门架吊放装备,能在高达6级海况下工作。波浪补偿技术,消除了波浪摇摆引起的门架上吊接头的摇晃影响,提供了海上作业的平稳性平台,该技术还消除了波浪摇摆与起伏引起的吊缆起降影响,做到吊放平稳。
安装在吊接头平台上的遥操作水下机械手、抓取式收放笼等装置,因为相对平稳,才能有效实现对水中动荡着的无人潜水器进行精准抓取等作业。机械手主要用来代替以往的人工下船危险性辅助作业,在母船上用人手模拟操作动作进行作业;正在计划研制的下一代带波浪补偿功能的具有视觉智能的水中作业机器人能完全代替人工水中辅助作业;抓取式收放笼,模拟的是人手的抓取动作,整体用软性材料包覆,能有效保护各种各类潜器的外部装置和外观碰擦,对船边范围内的任何水中漂浮物都可开合抓取收放。
带动力水中主动收放装置相当于一个小型动态收放船坞,用吊机从母船吊放水中后,可自行开出一定距离(缆限)去主动回收水中漂浮物,也可静止不动待无人潜水器开入船坞中,然后用吊机回收到母船;其中的船坞形状与材料可进行模块化换装,以适应和保护各种易损形式的无人潜水器。
对普通的圆形或小型航行器,如水下无人航行器、小型无缆水下机器人等,可用抓取式收放笼进行快捷方便收放;对无动力无人航行器或离船较远装置,如水下滑翔机等,可用带动力主动收放装置回收;对重载或外形特殊的无人潜水器装置,如大型无缆水下机器人等,收放时用波浪补偿吊机收放,用机械手辅助解扣和挂扣作业。
“‘船载无人潜水器收放系统’解决了在各种海况下‘稳、准、快’地布放回收多类潜水器的难题。”卢道华说。
填补国内技术和装备空白
20世纪80年代,为满足在恶劣海况下安全高效收放潜水器、救生艇等海上装置的实际需要,一些欧美国家开始了对具备波浪补偿功能的收放装备进行研究并持续至今。随着研发投入和实际应用经验的不断增长,国外相关方面已在设计制造和实用上达到很高的水准,但对我国采取了技术封锁和装备垄断。
我国在波浪补偿总体与系统设计技术上研究不足,特别是相关的姿态与升沉、平移测量与控制技术存在多项技术难点,相关技术与器件依赖国外提供且价格昂贵,制约了该类装备的应用与产业发展。
江苏科技大学自2005年起,由卢道华教授担任主持人,组织包括中国船舶集团所属中船绿洲镇江辅机公司、716所、724所、南京航空航天大学等国内产学研合作团队,以国家科技部重点研发计划、国家自然基金、国家海洋局区域示范、江苏省前瞻性产学研重大战略产品等项目为支撑,历经16年,研究波浪补偿理论与方法,建立波浪补偿试验系统,开发具有波浪补偿功能的专用系列化新装备,从而实现了我国该类装备的国产化、系列化,形成了包括设计、制造、生产、试验、评价、优化的装备研制体系。目前许多相关技术和系列装备已在船舶行业进行了重要应用。
卢道华教授团队以多个重点项目为支撑,研究波浪运动补偿理论与方法,建立补偿试验平台与评价办法,提出解决波浪运动补偿的测控问题的新技术,创立补偿装置的设计方法与制造体系,攻克波浪运动补偿的重大技术问题,开发了具有波浪补偿功能的专用系列化新装备并进行推广应用。
“船载无人潜水器收放系统”相关装备的国产化、系列化,填补了国内相关技术和装备空白,打破了国外封锁和垄断,推动了船用装备技术与产业的发展,也为海防事业作出了突出贡献。

(记者 唐 芳)
相关推荐
-
在海上也能如“立”平地 无人潜水器收放实现稳、准
-
 医疗版块遭遇黑天鹅,进入调整期
医疗版块遭遇黑天鹅,进入调整期
-
 新材料的应用或带来冬奥比赛成绩的“大突破”
新材料的应用或带来冬奥比赛成绩的“大突破”
-
 成本、工艺更“亲民” 光解水制氢产业已初露曙光
成本、工艺更“亲民” 光解水制氢产业已初露曙光
-
 《最终幻想14》出现住房紧张问题 开发商正着手解决
《最终幻想14》出现住房紧张问题 开发商正着手解决
-
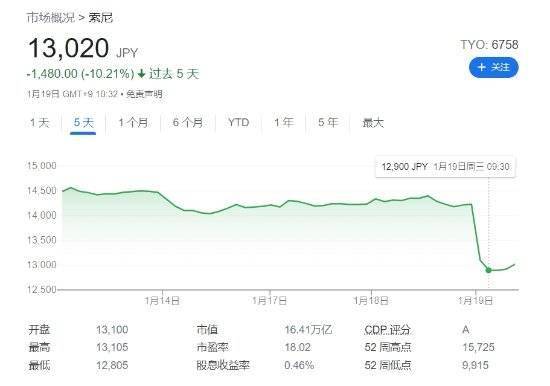 最低收盘价!微软宣布收购动视暴雪后 索尼股价大幅
最低收盘价!微软宣布收购动视暴雪后 索尼股价大幅
-
 龙腾世纪制作人:生软魔法是胡说八道 希望人们不要
龙腾世纪制作人:生软魔法是胡说八道 希望人们不要
-
 微软收购动视暴雪是否会违反反垄断法?
微软收购动视暴雪是否会违反反垄断法?
-
 《彩六异种》预载及解锁时间公开 国内玩家19日可解
《彩六异种》预载及解锁时间公开 国内玩家19日可解
-
 海底火山喷发引发海啸 汤加政府正加紧修复通信线路
海底火山喷发引发海啸 汤加政府正加紧修复通信线路
-
 5年来首次!日本气象厅16日凌晨连续发布海啸警报
5年来首次!日本气象厅16日凌晨连续发布海啸警报
-
 沙特罕见降雪!经连续3天覆盖沙丘道路
沙特罕见降雪!经连续3天覆盖沙丘道路
-
 治疗打嗝的办法就是被“吓一跳”到底有没有科学依据
治疗打嗝的办法就是被“吓一跳”到底有没有科学依据
-
 2022年首轮!我国南方多地出现较强降雨
2022年首轮!我国南方多地出现较强降雨
-
 一次火山喷发造成的海啸 搅动整个太平洋?
一次火山喷发造成的海啸 搅动整个太平洋?
-
 数量增加35倍!SpaceX星链卫星被指严重影响天文观测
数量增加35倍!SpaceX星链卫星被指严重影响天文观测
-
 2022年春运拉开帷幕 今年为啥没有大年三十?
2022年春运拉开帷幕 今年为啥没有大年三十?
-
 全球的火山若一起喷发 结果会怎样?
全球的火山若一起喷发 结果会怎样?
-
 凌空天行称2024年完成运输飞行器的首飞!比传统飞机
凌空天行称2024年完成运输飞行器的首飞!比传统飞机
-
 汤加海底火山大爆发 近海岸遭破坏明显
汤加海底火山大爆发 近海岸遭破坏明显